
ခြုံငုံသုံးသပ်ချက်
တံတားကရိန်းဟု အများအားဖြင့် လူသိများသော "driving" သည် စက်မှုလုပ်ငန်းနှင့် သတ္တုတူးဖော်ရေး လုပ်ငန်းများတွင် အသုံးများသော lifting machine တစ်မျိုးဖြစ်ပြီး ၎င်း၏ လုပ်ငန်းလည်ပတ်မှု ယန္တရားသည် အခြေခံအားဖြင့် သီးခြားလွတ်လပ်သော မောင်းနှင်မှုစနစ်၊ ကားမောင်းနှင်မှုစနစ်၊ ချိတ်မောင်းစနစ်၊ K-DRIVE အင်ဗာတာဖြင့် ဖွဲ့စည်းထားသည်။ အထက်ဖော်ပြပါ မောင်းနှင်မှုစနစ်သုံးခုကို အောင်မြင်စွာ ပြုပြင်ပြောင်းလဲခဲ့ပြီး၊ လမ်းလျှောက်ခြင်းမတိုင်မီနှင့် လမ်းလျှောက်ပြီးနောက် မောင်းနှင်မှုစနစ်၏ အသွင်ကူးပြောင်းမှုဖြစ်စဉ်ကို အဓိကအားဖြင့် ဖော်ပြသည်။

အစီအစဥ် အားသာချက်များ
- Field oriented current open-loop vector control၊ အပြည့်အဝ decoupled motor variables၊ ကြီးမားသော low-frequency torqu-e၊ အမြန်တုံ့ပြန်မှု၊ စသည်တို့။
- KD600 သည် PG အခမဲ့ အဖွင့်-ကွင်းဆက် ကွက်ကွက်ထိန်းချုပ်မှုမုဒ် နှင့် vectorized V/F မုဒ်ကို လက်ခံကျင့်သုံးပြီး ပထမဂီယာ၏ ပါဝါ le-vel ဖွဲ့စည်းမှုပုံစံကို ချဲ့ထွင်စေသည်။
- ကြိမ်နှုန်းအကွာအဝေး- 0.5-600Hz အပိုင်းဆက်တင်၊ stepl-ess စဉ်ဆက်မပြတ် ချိန်ညှိမှု၊
- အလုပ်လုပ်သောဗို့အားအကွာအဝေး- 380V ± 20% နှင့် ဘတ်စ်ကား vol-tage သည် 360VDC သို့ ချက်ခြင်း လွတ်ကျသွားသည်။
- Overloadcapacity- အဆင့်သတ်မှတ်ထားသော လက်ရှိ၏ 150%၊ 1 မိနစ်ခွင့်ပြုသည်။ 200% အဆင့်သတ်မှတ်ထားသော လက်ရှိ၊ 1s ခွင့်ပြုသည်;
- Torque ဝိသေသလက္ခဏာများ- စတင် torque၊ အဆင့်သတ်မှတ်ထားသော torque ၏ 2 အဆထက်များသော၊ ကြိမ်နှုန်းနိမ့် torque၊ 1Hz အဆင့်သတ်မှတ်ထားသော torque ၏ 1.6 ဆထက် ကြီးသည်။ ဘရိတ် torque သည် သတ်မှတ်ပေးထားသော torque ထက် ပိုကြီးသည်။
လည်ပတ်မှုလက္ခဏာများ
- ကရိန်းရုတ်သိမ်းသည့်ယန္တရားတွင် ကြီးမားသောစတင် torq-ue ရှိပြီး ပုံမှန်အားဖြင့် သတ်မှတ်ထားသော ရုန်းအား၏ 150% ထက်ကျော်လွန်ပါသည်။ ဝန်ပိုခြင်းနှင့် အခြားအချက်များကို ထည့်သွင်းစဉ်းစားပါက၊ စတင်ခြင်းနှင့် အရှိန်မြှင့်ခြင်းလုပ်ငန်းစဉ်အတွင်း အဆင့်သတ်မှတ်ထားသော torque ၏ အနည်းဆုံး 200% ကို ပံ့ပိုးပေးရမည်။
- lifting ယန္တရားသည် အောက်ဘက်သို့ လည်ပတ်သွားသောအခါ၊ မော်တာသည် ပြန်လည် ထုတ်ပေးသော ဓာတ်အားထုတ်လုပ်သည့် အခြေအနေတွင် ရှိနေမည်ဖြစ်ပြီး၊ စွမ်းအင်သုံးစွဲမှု ဘရိတ်အုပ်ခြင်း သို့မဟုတ် လျှပ်စစ်ဓာတ်အားလိုင်းအား ပြန်လည်ထုတ်ပေးခြင်း ဖြစ်ရပါမည်။
- ရုတ်သိမ်းထားသော အရာဝတ္တုသည် ထွက်ခွာသွားသောအခါ သို့မဟုတ် မြေနှင့်ထိသောအခါတွင် ရုတ်သိမ်းသည့်ယန္တရား၏ ဝန်သည် ဒရမ်မာဖြင့် ပြောင်းလဲသွားပြီး၊ ကြိမ်နှုန်းပြောင်းစက်သည် impa-ct ဝန်ကို ချောမွေ့စွာ ထိန်းချုပ်နိုင်လိမ့်မည်၊
- စက်ပိုင်းဆိုင်ရာဒီဇိုင်းအတွင်း ကရိန်း၏ ရှေ့နှင့်အနောက် သွားလာရေးယန္တရား၏ Asthetraveling speed သည် မြင့်မားခြင်းမရှိပါ၊ အလုပ်လုပ်သော စွမ်းဆောင်ရည်ကို မြှင့်တင်ရန်အတွက် သင့်လျော်သောအရှိန်လွန်မှုအတွက် converter ကို အသုံးပြုနိုင်ပါသည်။
ရိုးရှင်းသောဝါယာကြိုးပုံကြမ်း
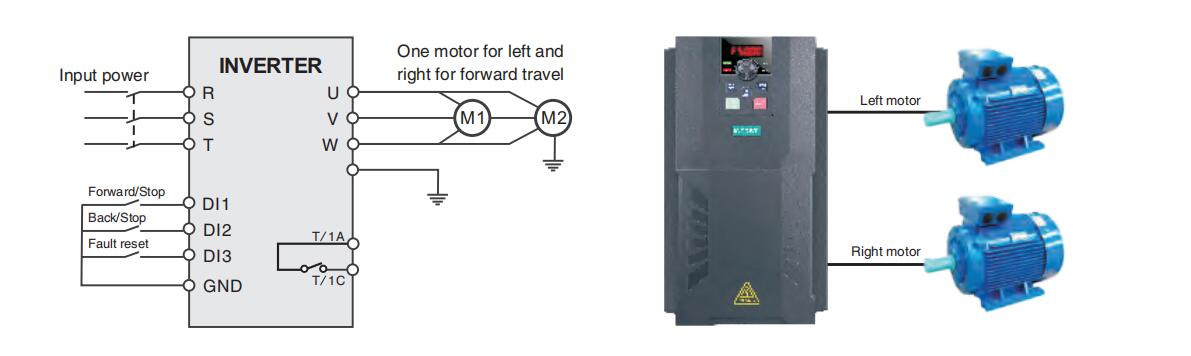
ကန့်သတ်သတ်မှတ်ချက်ng နှင့် ဖော်ပြချက်(ဘယ်ညာ မော်တာ ခရီးသွားခြင်း ကန့်သတ်ချက်များ)
| ကန့်သတ်ချက် | ရှင်းပြပါ။ | ကန့်သတ်သတ်မှတ်ချက် | ရှင်းပြပါ။ |
| P0-00=0 | VF ထိန်းချုပ်မှု | P5-00=1 | ရှေ့သို့ |
| P0-04=1 | ပြင်ပ terminal စတင်ရပ်တန့် | P5-01=2 | နောက်မှဆောင်ရွက်ပါ။ |
| P0-06=1 | ဒစ်ဂျစ်တယ် ကြိမ်နှုန်း သတ်မှတ်ခြင်း။ | P6-00=2 | Relay 1 ပြတ်တောက်မှု အထွက် |
| P0-14=60.00 | အများဆုံးအကြိမ်ရေ | P4-01=1.6KW | ချိတ်ဆက်ထားသော မော်တာပါဝါ |
| P0-16=60.00 | အထက်ကန့်သတ်ကြိမ်နှုန်း | P4-02=380V | မော်တာအဆင့်သတ်မှတ်ဗို့ |
| P0-11=60.00 | ဒစ်ဂျစ်တယ် ဆက်တင် အကြိမ်ရေ | P4-04=3.3A | မော်တာ အဆင့်သတ်မှတ်ထားသော လက်ရှိ |
| P0-23=3.0s | အရှိန်မြှင့်ချိန် | P4-05=50Hz | မော်တာ၏ကြိမ်နှုန်းအဆင့်သတ်မှတ်ထားသည်။ |
| P0-24=2.0s | အရှိန်လျှော့ချိန် | P4-06=960R/မိနစ် | မော်တာ၏အမြန်နှုန်းသတ်မှတ်ထားသည်။ |
| မှတ်ချက်- လှိုင်းနှုန်းပြောင်းစက်တစ်ခုအား မော်တာနှစ်ခုဖြင့် အသုံးပြုသောအခါ၊ မော်တာတစ်ခုစီကို ကာကွယ်ရန်အတွက် မော်တာတစ်ခုစီ၏ ရှေ့ဆုံးတွင် ကိုက်ညီသော အပူဓာတ်ပြန်တမ်းတစ်ခုကို တပ်ဆင်ရန် ပြင်းပြင်းထန်ထန် အကြံပြုထားသည်။ | |||
စစ်ဆင်ရေးအကျိုးသက်ရောက်မှုခွဲခြမ်းစိတ်ဖြာ
KD600 စီးရီး ကြိမ်နှုန်းပြောင်းစက်သည် ခရီးလှည့်လည်ခြင်းစနစ်တွင် ကြိမ်နှုန်းပြောင်းလဲခြင်းအသွင်ပြောင်းခြင်းကို လုပ်ဆောင်ခဲ့ပြီး tr-အသွင်ပြောင်းခြင်းအကျိုးသက်ရောက်မှုသည် အတော်လေးစံပြဖြစ်သည်၊ အဓိကအားဖြင့် ပြသထားသည်-
- စတင်ချိန်တွင် ပျော့ပျောင်းသော စတင်မှုနှင့် ပျော့ပျောင်းသော ရပ်တန့်မှုကို သိရှိထားပြီး၊ ဓာတ်အားလိုင်းအပေါ် သက်ရောက်မှုကို လျော့နည်းစေပါသည်။
- ကြိမ်နှုန်းပြောင်းစက်ကို အသုံးပြုပြီးနောက်၊ မူလ shift contactor နှင့် speed regulating resistor တို့ကို ချန်လှပ်ထားကာ ပြုပြင်ထိန်းသိမ်းမှုကုန်ကျစရိတ်ကို သက်သာစေရုံသာမက ပြုပြင်ထိန်းသိမ်းမှုအတွက် စက်ရပ်ချိန်ကိုလည်း လျှော့ချပေးသည့်အတွက် အထွက်ကို တိုးစေပါသည်။
- ပင်မချိတ်သည် 5Hz ~ 30Hz တွင်အလုပ်လုပ်သောအခါ၊ စွမ်းအင်ချွေတာသည့်အကျိုးသက်ရောက်မှုသည် အလွန်ထင်ရှားသည်။
- ရှေ့နှင့်အနောက် လှည့်ပတ်မှုကို ထိန်းချုပ်ရန် ကြိမ်နှုန်းပြောင်းသည့်ကိရိယာကို အသုံးပြုပြီး ဘယ်နှင့်ညာ ခရီးလှည့်လည်ခြင်း ယန္တရားစီးရီးများသည် ကြိမ်နှုန်းကျော်အလုပ်လုပ်မှုကို နားလည်သဘောပေါက်နိုင်သည်။ လုံခြုံစိတ်ချရမှုသေချာစေရေးအစီအစဥ်အရ၊ အလုပ်၏ထိရောက်မှုမှာ အလွန်တိုးတက်လာပြီး AC contactors များကို မကြာခဏအစားထိုးခြင်းကြောင့် ခရီးသွားကိရိယာများ၏ ပြုပြင်ထိန်းသိမ်းမှုပမာဏကိုလည်း လျော့ကျစေသည်။
အပိတ်အမှာစကား
ကြိမ်နှုန်းပြောင်းစက်ကို ရှေ့နှင့်နောက်သို့ လမ်းလျှောက်ခြင်းနှင့် ဘယ်ညာလမ်းလျှောက်ယန္တရားစီးရီးများကို ထိန်းချုပ်ရန်အတွက် အသုံးပြုထားပြီး၊ overclocking လုပ်ဆောင်မှုကို သိရှိနိုင်ပြီး ဘေးကင်းစိတ်ချရမှုအောက်တွင် လုပ်ငန်းစွမ်းဆောင်ရည်ကို များစွာတိုးတက်ကောင်းမွန်စေသည့်အပြင် ယာဉ်မောင်းစက်ပစ္စည်းများ၏ ပြုပြင်ထိန်းသိမ်းမှုဆိုင်ရာ အလုပ်တာဝန်များကိုလည်း လျှော့ချပေးပါသည်။ AC contactors များကို မကြာခဏ အစားထိုးခြင်း။
လျှောက်လွှာဆိုက်

ပို့စ်အချိန်- Nov-17-2023