
ခြုံငုံသုံးသပ်ချက်
CNC စက်ကိရိယာသည် စက်ပိုင်းဆိုင်ရာ၊ လျှပ်စစ်၊ ဟိုက်ဒရောလစ်၊ pne-umatic၊ မိုက်ခရိုအီလက်ထရွန်းနစ်နှင့် သတင်းအချက်အလက်နှင့် အခြားနည်းပညာများ ပေါင်းစပ်အသုံးပြုမှုဖြစ်သည့် လျှပ်စစ်-စက်မှုဆိုင်ရာပေါင်းစပ်ထုတ်ကုန်များထဲမှ တစ်ခုဖြစ်သည့် စက်ပိုင်းဆိုင်ရာကုန်ထုတ်ကိရိယာများတွင် လိုက်လျောညီထွေရှိသော၊ universal၊ မြင့်မားသောတိကျမှု၊ မြင့်မားသော၊ ထိရောက်မှု "ပြောင်းလွယ်ပြင်လွယ်" အလိုအလျောက် ထုတ်လုပ်မှု စက်ကိရိယာ၊ ၎င်းသည် လိုအပ်သည့် အမျိုးမျိုးသော လည်ပတ်မှုနှင့် အဆင့်များကို လုပ်ဆောင်ပေးမည်ဖြစ်ပြီး၊ ဒစ်ဂျစ်တယ်ကုဒ်ဖြင့် workpi-ece ၏ ပုံသဏ္ဍာန်နှင့် အရွယ်အစား၊ ထိန်းချုပ်မှုကြားခံမှတဆင့် ဂဏန်းထိန်းချုပ်ကိရိယာသို့၊ ဂဏန်းထိန်းချုပ်ကိရိယာသို့ ထည့်သွင်းသည့် အချက်အလက်ဆီသို့ စီမံဆောင်ရွက်ခြင်းနှင့် တွက်ချက်ခြင်း၊ အမိန့်ပေးထိန်းချုပ်ခြင်း စက်ကိရိယာစနစ်နှင့် မောင်းနှင်မှု အစိတ်အပိုင်းများ၊ လိုအပ်သော အလုပ်ကို အလိုအလျောက် လုပ်ဆောင်ခြင်း။ CNC စက်ကိရိယာများ၏ နည်းပညာအဆင့်နှင့် အထွက်နှုန်းနှင့် သတ္တုဖြတ်တောက်ခြင်း စက်ကိရိယာများ၏ စုစုပေါင်းပိုင်ဆိုင်ခွင့်သည် နိုင်ငံတစ်နိုင်ငံ၏ အမျိုးသားစီးပွားရေးဖွံ့ဖြိုးတိုးတက်မှုနှင့် စက်မှုကုန်ထုတ်မှုအဆင့်ကို သေချာသိရှိနိုင်စေရန် အရေးကြီးသောညွှန်ကိန်းများထဲမှတစ်ခုဖြစ်သည်။ မကြာသေးမီနှစ်များအတွင်း တရုတ်စီးပွားရေးလုပ်ငန်းများတွင် CNC စက်ကိရိယာများ၏ဝေစုသည် တစ်နှစ်ထက်တစ်နှစ် တိုးလာကာ ၎င်းကို အကြီးစားနှင့် အလတ်စားလုပ်ငန်းများတွင် ပိုမိုအသုံးပြုလာကာ ယေဘုယျအားဖြင့် ၎င်းကို အသေးစားနှင့် အလတ်စားစီးပွားရေးလုပ်ငန်းများတွင်သာမက၊ တစ်ဦးချင်းလုပ်ငန်းများ။
CNClathe လုပ်ငန်းစဉ်လိုအပ်ချက်များ
- စက်ကိရိယာကို CNC စက်ဖြင့်လုပ်ဆောင်သောအခါ၊ အစာပမာဏသည် ကြီးမားသည်၊ လုပ်ငန်းစဉ်-ssing မြန်နှုန်းနိမ့်သည်၊ နှင့် စက်ပစ္စည်း၏ မညီမညာသော မျက်နှာပြင်ကြောင့် စက်လည်ပတ်မှုတွင် ထိခိုက်မှုရှိသည်။
- Lathefinishing၊ ပြုပြင်မှု ထိရောက်မှု ရှိစေရန်အတွက် ချက်ခြင်း ပမာဏသည် အနည်းငယ်သာ သေးငယ်ပါသည်။
- spindle motor သည် အနိမ့်အမြန်နှုန်းနှင့် မြင့်မားသော torque output ရှိရန် လိုအပ်ပြီး stab-le ဖြစ်ပြီး အရှိန်ပြင်းစွာ မောင်းနှင်နိုင်သည်။
- Analog အချက်ပြမှုများကို လက်ခံရရှိခြင်းသည် မြင့်မားသော linearity နှင့် low load interference လိုအပ်သည်။
- မော်တာဆူညံသံသည် သေးငယ်ပြီး စနစ်အလိုအလျောက်စနစ်ဆိုင်ရာ စက်ပစ္စည်းများတွင် အနှောင့်အယှက်ဖြစ်စေမှုမှာ သေးငယ်ပါသည်။ အရှိန်မြှင့်ပြီး တတ်နိုင်သမျှ အရှိန်လျှော့ပါ။
CNClathe KD600 စီးရီးထုတ်ကုန်များ၏အားသာချက်များ
Kd600 စီးရီးစွမ်းဆောင်ရည်မြင့်မားသော vector အင်ဗာတာသည် အဆင့်မြင့် flux ထိန်းချုပ်မှုနည်းပညာကို လက်ခံသည်၊ အနိမ့်အမြန်နှုန်းတွင် မော်တာ torque သည် ကြီးမားသည်၊ မြန်နှုန်းတိကျသည်၊ မြင့်မားသည်၊ စျေးနှုန်းသည် သင့်လျော်သည်၊ လုပ်ဆောင်ချက်သည် ပြီးပြည့်စုံသည်၊၊ ချက်ချင်းဆိုသလို ပါဝါချို့ယွင်းမှုကို စီမံဆောင်ရွက်ပေးခြင်းနှင့် အရှိန်ခြေရာခံခြင်းဖြင့် ပြန်လည်လုပ်ဆောင်နိုင်သည် စဉ်ဆက်မပြတ်လည်ပတ်မှုယန္တရားကိုရရှိရန်စနစ်အားသေချာစေရန်၊ မော်တာသည်အမြင့်ဆုံးထိရောက်မှုအခြေအနေတွင်လည်ပတ်ကြောင်းသေချာစေရန်၊ ထို့ကြောင့် KD600 စီးရီးစွမ်းဆောင်ရည်မြင့် vector အင်ဗာတာကိုအသုံးပြုခြင်းသည် spindle AC servo စနစ်အစားစက်ကိရိယာလုပ်ငန်းအတွက်အကောင်းဆုံးရွေးချယ်မှုဖြစ်သည်။ KD600 စီးရီး အင်ဗာတာတွင် အောက်ပါအင်္ဂါရပ်များ ရှိသည်။
- ထူးခြားသောအားနည်းသံလိုက်ထိန်းချုပ်မှုနည်းပညာ- အနိမ့်ကြိမ်နှုန်းကြီးမားသော torque မော်တာကို ကောင်းမွန်စွာထိန်းချုပ်နိုင်ပြီး 0 ~ 600Hz တွင်လည်ပတ်နိုင်သည်။
- တည်ငြိမ်သော ရပ်တန့်ခြင်းအမြန်နှုန်း- သံလိုက်ဓာတ် အရှိန်လျော့ခြင်း ရပ်တန့်ခြင်းနည်းပညာသည် မော်တာကို နှေးကွေးစေပြီး အချိန်တိုအတွင်း ရပ်တန့်စေနိုင်သည်။
- မြန်နှုန်းတိကျမှုနှင့် တည်ငြိမ်မှု- မြန်နှုန်းသတ်မှတ်ခြင်း၏ မျဥ်းညီမှုသည် ကောင်းမွန်သည်၊ မြန်နှုန်းတည်ငြိမ်မှု၏ တိကျမှုသည် မြင့်မားသည်၊ ဝန်ကိုပြောင်းလဲသောအခါ မြန်နှုန်း၏အတက်အကျသည် 5/1000 အတွင်းဖြစ်သည်။
- အလွန်ကောင်းမွန်သော ကြိမ်နှုန်းနိမ့်စွမ်းဆောင်ရည်- PG-free vector control algorithm၊ ကြိမ်နှုန်းနိမ့် 1Hz အထိ 150% အဆင့်သတ်မှတ်ထားသော torque အထွက်အား၊ အလွတ်လုပ်ဆောင်နေစဉ်အတွင်း ပြင်းထန်သောဖြတ်တောက်မှုအားသေချာစေရန်အတွက် အကောင်းဆုံးလုပ်ဆောင်ထားသည်။
- ပံ့ပိုးပေးသည့်အကြိမ်ရေအများအပြားထည့်သွင်းခြင်းမုဒ်များ- ဗို့အားအရင်းအမြစ် 2 ခု 0 ~ 10V သို့မဟုတ် -10V မှ +10V အဝင်၊ 1 လက်ရှိအရင်းအမြစ် 4~20mA သို့မဟုတ် 0~20mA ထည့်သွင်းမှု။
- ကျယ်ပြန့်သော ဂရစ်ဗို့အား အသုံးချမှု- အဆင့်မြင့် ပြောင်းလဲခြင်း ပါဝါထောက်ပံ့မှု ဒီဇိုင်းကို ဂရစ်ပတ်ဝန်းကျင် အမျိုးမျိုးတွင် အသုံးချနိုင်သည်။
- လက်ရာမြောက်သောထုတ်လုပ်မှုလုပ်ငန်းစဉ်- ထူးခြားသောအပေါ်ယံအထူထပ်ခြင်းလုပ်ငန်းစဉ်ကိုခံယူပြီး လေပြွန်သည် အတွင်းပိုင်း PCB နှင့် လုံးဝခွဲထုတ်ထားပြီး သတ္တုဖုန်မှုန့်များ၊ အဆိပ်သင့်ဓာတ်ငွေ့များနှင့် စိုထိုင်းဆကဲ့သို့သော ကြမ်းတမ်းသောရုပ်ပိုင်းဆိုင်ရာပတ်ဝန်းကျင်နှင့် လိုက်လျောညီထွေစွာ လိုက်လျောညီထွေဖြစ်စေသည်။
- Built-in ယိုစိမ့်မှု စုပ်ယူမှုပတ်လမ်းသည် စက်ပစ္စည်းများကို အားသွင်းသည့်အခါ လူ့ခန္ဓာကိုယ်သို့ လျှပ်စစ်ရှော့ခ်ဖြစ်မှုကို လျှော့ချပေးသည်။
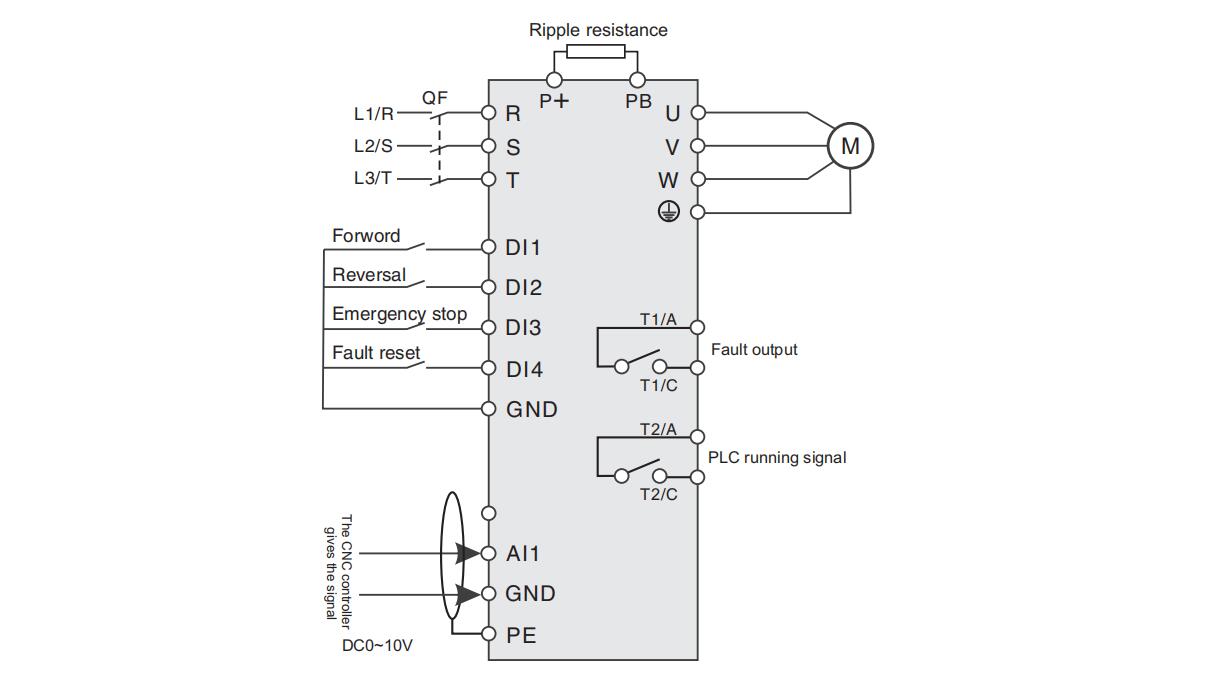
အခြေခံဝါယာကြိုးပုံကြမ်း
ကန့်သတ်ချက်များ ဆက်တင်များနှင့် ဖော်ပြချက်
| ကန့်သတ်သတ်မှတ်ချက် | ညွှန်ကြားချက်များ | ကန့်သတ်သတ်မှတ်ချက် | ညွှန်ကြားချက်များ |
| P0-03=1 | PG vector mode မရှိပါ။ | P4-01=11KW | မော်တာ၏ ပါဝါ အဆင့်သတ်မှတ်ထားသည်။ |
| P0-04=1 | ပြင်ပဂိတ်သည် စတင်သည် သို့မဟုတ် ရပ်သည်။ | P4-02=380V | မော်တာ၏အဆင့်သတ်မှတ်ဗို့အား |
| P0-06=2 | analog ပမာဏ AI1 ကို ပေးထားသည်။ | P4-04=22.6A | မော်တာ၏အဆင့်သတ်မှတ်ထားသောလျှပ်စီး |
| P0-14=150 | အများဆုံးထွက်နှုန်း | P4-05=50Hz | မော်တာ၏ကြိမ်နှုန်းအဆင့်သတ်မှတ်ထားသည်။ |
| P0-16=150 | အထက်ဖော်ပြပါ လည်ပတ်မှုအကြိမ်ရေကန့်သတ်ချက် | P1-06=1435RPM | မော်တာမြန်နှုန်းအဆင့်သတ်မှတ်ထားသည်။ |
| P0-23=1.0 | အရှိန်မြှင့်ချိန် | P6-00=2 | ပြတ်ရွေ့အထွက် |
| P0-24=0.8 | အရှိန်လျှော့ချိန် | P6-02=1 | လည်ပတ်နေသော ကြိမ်နှုန်းပြောင်းစက် |
| P5-00=1 | ရှေ့ပြေး | P5-01=2 | ပြောင်းပြန်ပြေးသည်။ |
| P4-01~P4-06 မော်တာ ကန့်သတ်ချက်များ ကျေးဇူးပြု၍ တိကျစွာ ထည့်ပါ။ | |||
အမှားရှာပြင်ခြင်းရလဒ်
KD600 စီးရီးစွမ်းဆောင်ရည်မြင့် vector ကြိမ်နှုန်းပြောင်းစက်သည် စက်ကိရိယာ spindle ထိန်းချုပ်မှု၏လိုအပ်ချက်များကို အပြည့်အဝဖြည့်ဆည်းပေးနိုင်ကြောင်း သက်သေပြခဲ့ပြီးဖြစ်သည်။ KD600 သည် မတူညီသော အစိတ်အပိုင်းများ၏ လုပ်ဆောင်မှု လိုအပ်ချက်များကို ဖြည့်ဆည်းပေးရန်အတွက် 150% torque နည်းပါးသော အမြန်နှုန်း (ကြိမ်နှုန်းနိမ့်) လည်ပတ်မှုအောက်တွင်ပင် ထိပ်တန်း PG-free vector ထိန်းချုပ်မှုမုဒ်ကို လက်ခံရရှိပြီး ရိုးရာ rolling bearing spindle တည်ဆောက်ပုံနှင့် ဤဗိုင်းလိပ်တံကို အပြည့်အဝ အစားထိုးနိုင်ပါသည်။ ဖွဲ့စည်းပုံသည် ရိုးရှင်းပြီး ကျစ်လျစ်ပြီး စစ်မှန်သော stepless speed စည်းမျဉ်းကို ရရှိနိုင်သည်။ ဤဗိုင်းလိပ်တံ၏အမြန်နှုန်းကို မတူညီသောလုပ်ဆောင်မှုလုပ်ငန်းစဉ်များတွင် output frequency ကိုထိန်းချုပ်ရန် ပြင်ပ analog signal ဖြင့်ထိန်းချုပ်ထားသည် (ဥပမာ-ကြမ်းတမ်းခြင်း၊ ပြီးခြင်းစသည်ဖြင့်) ကွဲပြားခြားနားသောအမြန်နှုန်းလိုအပ်သည်၊ ယခုအချိန်တွင်၊ ဂဏန်းထိန်းချုပ်မှုစနစ်သည် မတူညီသော analog ဗို့အားအချက်ပြမှုများကို ထုတ်ပေးနိုင်သည်။ မတူညီသောအမြန်နှုန်းကိုရရှိရန် အင်ဗာတာနှင့် စတင်ခြင်းနှင့် ရပ်တန့်ခြင်းအချက်ပြခြင်းကို ဂဏန်းထိန်းချုပ်မှုစနစ်ဖြင့်လည်း ထိန်းချုပ်ထားပြီး၊ ၎င်းသည် အလိုအလျောက်စနစ်၏အတိုင်းအတာကို ပိုမိုကောင်းမွန်စေပြီး ကိရိယာ၏ဝန်ဆောင်မှုသက်တမ်းကို တိုးမြှင့်ပေးသည်။

ပို့စ်အချိန်- Nov-17-2023